 MASNACHWYR TV
MASNACHWYR TV 


The optoelectronic tracking device has a built-in high-definition visible light through fog network camera plus a laser infrared fill light, built-in intelligent target detection and tracking algorithm, and realizes 24-hour uninterrupted target recognition and tracking in visible light, low illumination, severe haze weather, and nighttime . The fuselage is made of high-strength shock-absorbing alloy die-casting shell, and the overall three-proof spraying, heat insulation, high temperature and cold resistance, impact resistance, corrosion resistance, and good wind resistance and shock absorption performance.

| Model | TXPC3000 | |||
| Monitoring Distance | HD Camera | 3000~5000m | ||
| Thermal Camera | Human (1.8m×0.5m) | Vehicle (2.3m×2.3m) | UAV(0.3m×0.3m) | |
| Detection | 4200m | 12000m | 1200m | |
| Recognition | 1400m | 3000m | 500m | |
| Identification | 700m | 1500m | / | |
| Thermal Detector | Detector | Uncooled microbolometer focal plane array (Vox) | ||
| Pixel | 640×512 | |||
| Spectral Range | 8~14μm | |||
| NETD | ≤50mK@F1.0, 300K | |||
| Image Process | DDE, pseudo color | |||
| Thermal Lens | Focal Length | 30~150mm, 5xzoom | ||
| FOV | 4.2°×3.3°~20.6°×16.5° | |||
| F Value | F1.0~F1.2 | |||
| Lens Control | E-zoom, e-focus, auto focus | |||
| HD Camera | Sensor Type | 1/1.8′′ Progressive Scan CMOS | ||
| Coding Format | H.264/H.265 | |||
| Video Resolution | 25fps(2688×1520), support dual stream | |||
| Camera control | AGC, auto balance, auto backlight compensation, 3D digital noise reduce | |||
| HD Lens | Focal Length | 15.6~500mm, 32× | ||
| FOV | 0.8°~25.6° | |||
| Lens Control | E-zoom, e-focus, auto focus, auto iris | |||
| Interface | Power Supply | Wide range waterproof power adapter, AC90-295V, power consumption ≤180W | ||
| Network Interface | 1×10Base-T/100Base-TX, RJ45 | |||
| Environment indicators | Temperature | Working -25℃~+55℃(-40℃~+65℃ optional), Storage -40℃~+65℃ | ||
| Protection Grade | IP66 | |||

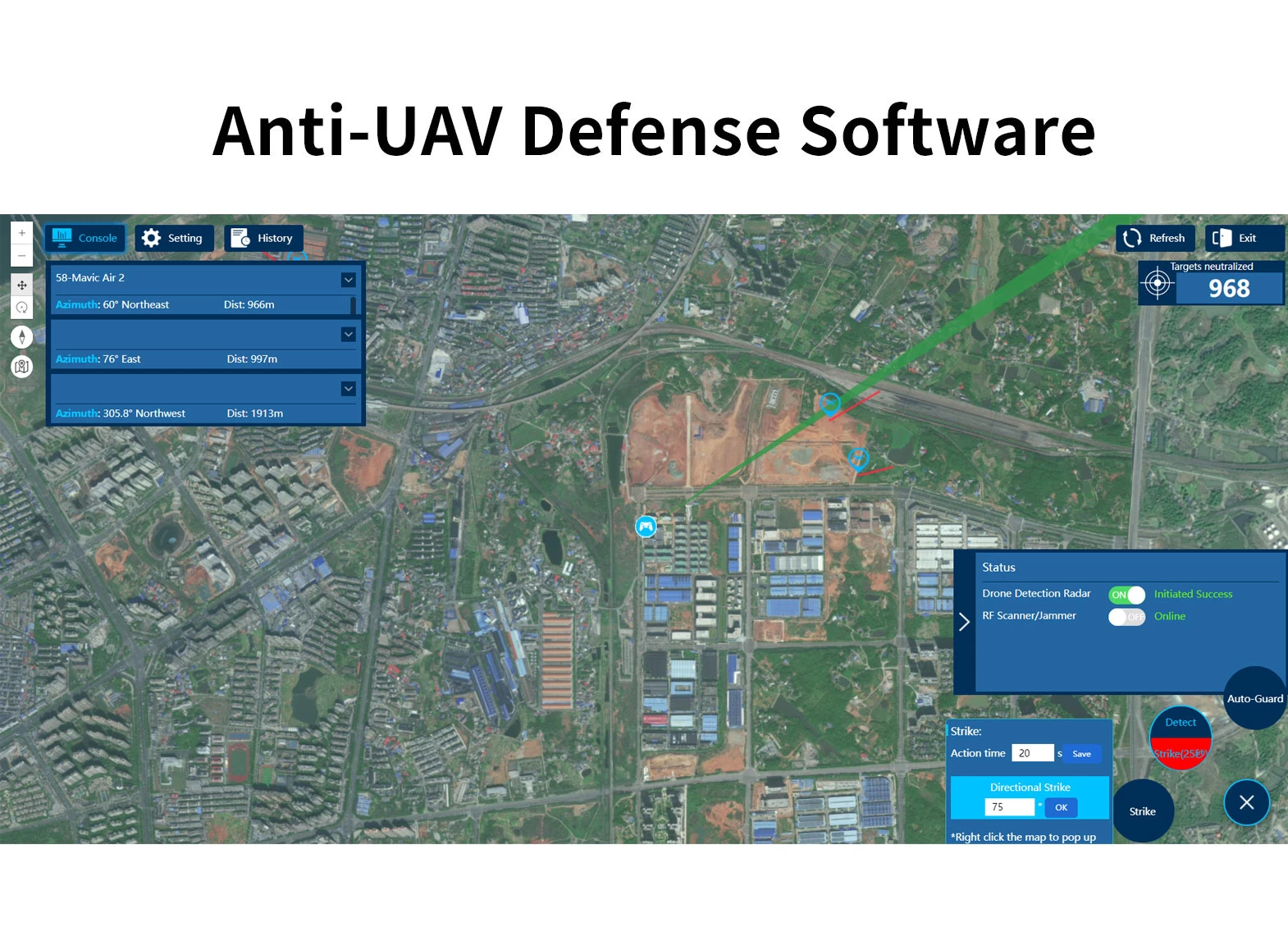
Mae System Amddiffyn Gwrth-UAV yn cynnwys offer pen blaen fel radar canfod, Synhwyrydd RF, Camera olrhain E/O, Dyfais jamio neu spoofing RF a meddalwedd llwyfan rheoli Cerbydau Awyr Di-griw. Pan fydd y drone yn mynd i mewn i'r parth amddiffyn, mae'r uned ganfod yn allbynnu gwybodaeth sefyllfa gywir trwy bellter gweithredol, ongl, cyflymder ac uchder. Wrth fynd i mewn i'r parth rhybuddio, bydd y system yn pennu'n annibynnol ac yn cychwyn y ddyfais jamio i ymyrryd â chyfathrebu'r drone, fel ag i beri i'r drôn ddychwelyd neu lanio. Mae'r system yn cefnogi rheoli dyfeisiau aml ac aml-barthau a gall wireddu 7*24 monitro pob tywydd a diogelu rhag ymlediad dronau.
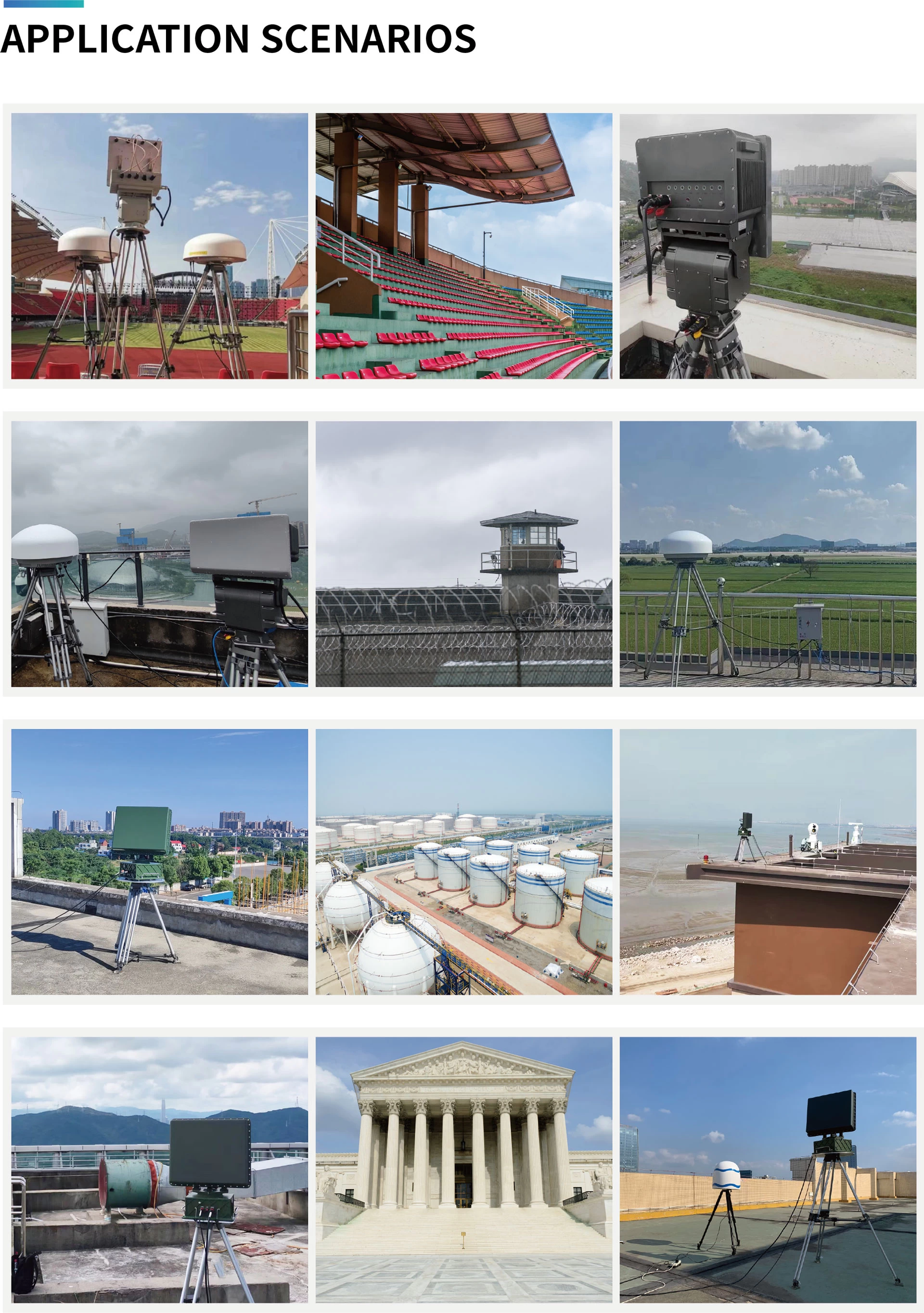
Mae System Amddiffyn Gwrth-UAV yn cynnwys uned canfod radar neu RF, Uned olrhain EO ac uned jamio. Mae'r system yn integreiddio canfod targed, olrhain & cydnabyddiaeth, gorchymyn & rheolaeth ar jamio, aml swyddogaethau mewn un. Yn seiliedig ar wahanol senarios cais, gellir defnyddio'r system yn hyblyg i'r datrysiad gorau posibl trwy ddewis gwahanol uned ganfod a dyfais jamio. Gellir gosod AUDS sefydlog, cerbyd symudol wedi'i fowntio neu symudol. Yn ôl math gosod sefydlog, Defnyddir AUDS yn eang mewn safle amddiffyn diogelwch lefel uchel, Defnyddir math wedi'i osod ar gerbyd fel arfer ar gyfer patrolio arferol neu fwy, a math cludadwy yn cael ei ddefnyddio llawer ar gyfer atal dros dro & rheolaeth mewn cynhadledd allweddol, digwyddiadau chwaraeon, cyngerdd ac ati.















WeChat
Sganiwch y Cod QR gyda wechat